
千寻智能开源具身智能基础模型Spirit v1.5:登顶 RoboChallenge
2026-01-13 17:01
83
来自千寻智能的具身智能基础模型Spirit v1.5,在RoboChallenge真机评测榜上,以总分66.09,成功率50.33%的成绩,超越美国明星公司Physical Intelligence的Pi0.5(π0.5),登顶榜首。
基于多样化的预训练数据采集范式,Spirit v1.5在插花、把水果放进篮子、挂牙刷杯等多项任务中,拿下第一,刷新榜单纪录。
经此一役,Spirit v1.5不仅是RoboChallenge自去年10月上线以来,首个击败baseline模型Pi0.5的国产具身模型,同时也是首个在RoboChallenge上成功率超过50%的具身智能模型。
在此之前,RoboChallenge榜单上,模型间的竞争已逐渐进入白热化阶段,Pi系列基线模型不断被逼近。
而现在,Spirit v1.5直接越过Pi0.5,拿下榜首。
这种密集、连续的刷榜节奏,多少有点让人想起当年AlexNet、VGG、GoogLeNet、ResNet刷新ImageNet的那段时间——
基准在被不断打破,模型天花板被一再抬高。
也正如当年CV的开源景象,Spirit v1.5同步开源了基模权重、推理代码以及使用样例,方便后续的研究者复现和进一步探索。
而正是在这被誉为具身智能「ImageNet」的RoboChallenge上,开源模型正以可验证、可复现的方式,持续推动具身能力向前发展。
开源具身模型能力,全球领先
截至2026年1月12日,Spirit v1.5在RoboChallenge上取得了当前最优的性能,超越了Pi0.5等之前的全球领先开源模型。
在RoboChallenge的Table30任务中,Spirit v1.5表现堪称“碾压级”,不仅在下列多项任务中夺得第一:
插花(arrange flowers)
水果入篮(arrange fruits in basket)
挂牙刷杯(hang toothbrush cup)
薯条倒碗(pour fries into plate)
开瓶器入抽屉(put opener in drawer)
笔入笔盒(put pen into pencilcase)
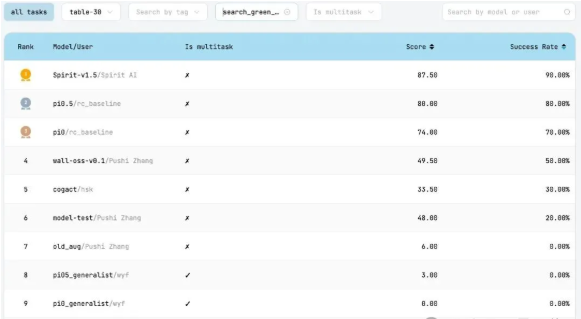
寻找绿盒(search green boxes)
浇花(water potted plant)
还在贴胶带(stick tape to box)、清扫垃圾(sweep the rubbish)、开关灯(turn on light switch)等任务上实现绝对领先。
其中“寻找绿盒”任务堪称高光时刻——Spirit v1.5直接将成功率拉至90%。
0
好文章,需要你的鼓励